Wielosensorowa bezzałogowa platforma do wysokorozdzielczych pomiarów hydrograficznych
Pod koniec ubiegłego roku KNIHM pozyskała bezzałogowy, nawodny pojazd USV Otter Pro (ang. Unmanned Surface Vehicle) zdolny do wykonywania pomiarów na akwenach płytkich i ultrapłytkich. To nowoczesna, wielosensorowa platforma wyposażona w sensory pomiarowe przeznaczona do prowadzenia badań środowiska wodnego oraz laserowego skanowania obiektów nawodnych, infrastruktury portowej, konstrukcji hydrotechnicznych. Otter Pro cechuje się budową modułową z możliwością demontażu na pojedyncze podzespoły (rys. 1)
Rys. 1. Modułowa budowa nawodnego pojazdu bezzałogowego Otter Pro
Bezzałogowa platforma Otter Pro wyposażona jest w podstawowe sensory przeznaczone do akwizycji danych: system GNSS oparty na precyzyjnych pomiarach RTK GPS, najnowszej generacji echosonda wielowiązkowa Norbit Winghead i80S zapewniająca wysokorozdzielcze pomiary głębokości akwenu, sonar boczny SSS, urządzenie do pomiaru i kompensacji przechyłów kątowych platformy (heave, pitch, roll, yaw), przygłowicowy czujnik prędkości propagacji fali akustycznej w wodzie, zintegrowany INS, kamera zobrazowania sytuacji rzeczywistej w strefie operowania pojazdu, LiDAR do pozyskiwania danych geoprzestrzennych, nawodnych i lądowych w górnej półsferze oraz opuszczany miernik prędkości dźwięku w kolumnie wody. Pojazd jest kontynuacją rozwoju już istniejących komponentów bazy dydaktycznej AMW związanej z nawigacyjno-hydrograficznym zabezpieczeniem działań sił Marynarki Wojennej na morzu tj. Pracowni zabezpieczenia hydrograficznego oraz Pływającego hydrograficznego laboratorium naukowo-badawczego.
Platforma jest zdolna do rejestracji danych batymetrycznych na akwenach ultrapłytkich, poniżej 1 metra), poszukiwania i weryfikacji przeszkód podwodnych dna w środowisku morskim i na zbiornikach śródlądowych. To system autonomiczny zdolny do operowania w terenie dzięki przenośnym systemom zasilania. Do sterowania pracą USV wykorzystywana jest przenośna stacja komputerowa typu „odpornego”. Inwestycja ta w połączeniu z istniejącymi już w Akademii Marynarki Wojennej pracowniami i laboratoriami umożliwi prowadzenie przede wszystkim szkolenia praktycznego oraz osiągnięcie efektów kształcenia zgodnie z przyjętymi programami kształcenia.
Na pokładzie pojazdu znajduje się najnowsza echosonda wielowiązkowa NORBIT WINGHEAD i80S formująca 1024 wiązek odbiorczych w szerokim sektorze kątowym do 210°. System posiada opcję „dual swath”, dzięki której liczba pomiarów punktowych głębokości w jednym impulsie rośnie z 1024 do 2048, co niewątpliwie zwiększa gęstość danych i rozdzielczość cyfrowych modeli dna. Szerokość wiązki akustycznej w nadirze wynosi 0.5° x 0.9° dla f = 400 kHz oraz 0.3° x 0.5° dla f = 700 kHz co przekłada się bezpośrednio na wysoką rozdzielczość danych pomiarowych. Ciekawą cechą sondy jest zintegrowany moduł IMU, który producent umieścił wewnątrz przetwornika. Unikalną w skali światowej jest funkcja aktywnej stabilizacji parametru „yaw”. Opcja stabilizacji odchyleń kursowych (myszkowania) nie jest obecnie na rynku dość powszechnym rozwiązaniem technologicznym.
Echosonda współpracuje z dwuantennowym systemem pozycjonowania GNSS i wbudowanym INS o dokładności horyzontalnej w trybie RTK ±8 mm i werytkalnej ±15 mm. Warto dodać, że dokładność pomiaru przechyłów „roll” i „pitch” wynosi 0.01° a dokładność wyznaczania kierunku 0.02° (RTK). Zastosowany na pojeździe model firmy Applanix POS MV spełnia wszystkie wymagania dokładnościowe i standardy Międzynarodowej Organizacji Hydrograficznej IHO, szczególnie dla stystemów wielowiązkowych pracujących w trudnych warunkach pogodowych z szeroką wiązką nadawczą powyżej 150°.
W wyniku realizacji inwestycji baza dydaktyczna Akademii Marynarki Wojennej została poszerzona o unikatową w skali kraju pływającą platformę pomiarową zapewniającą kompleksowe szkolenie podchorążych i kadry MW z zakresu uruchamiania, obsługi i eksploatacji pojazdów bezzałogowych, prowadzenia rekonesansu hydrograficznego przybrzeżnych akwenów morskich i śródlądowych oraz realizacji pomiarów sonarowych, batymetrycznych i topograficznych z użyciem sonaru bocznego, echosondy wielowiązkowej i LiDAR-u.
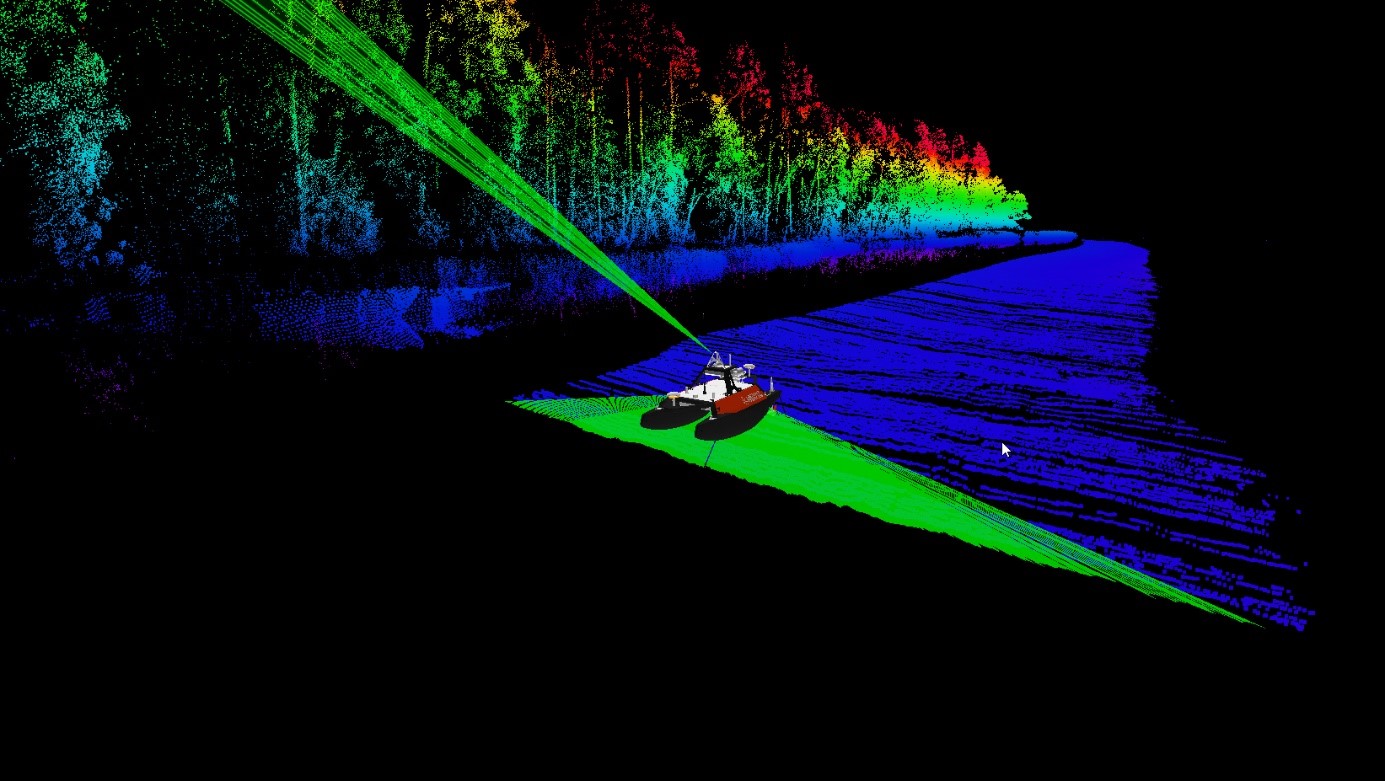
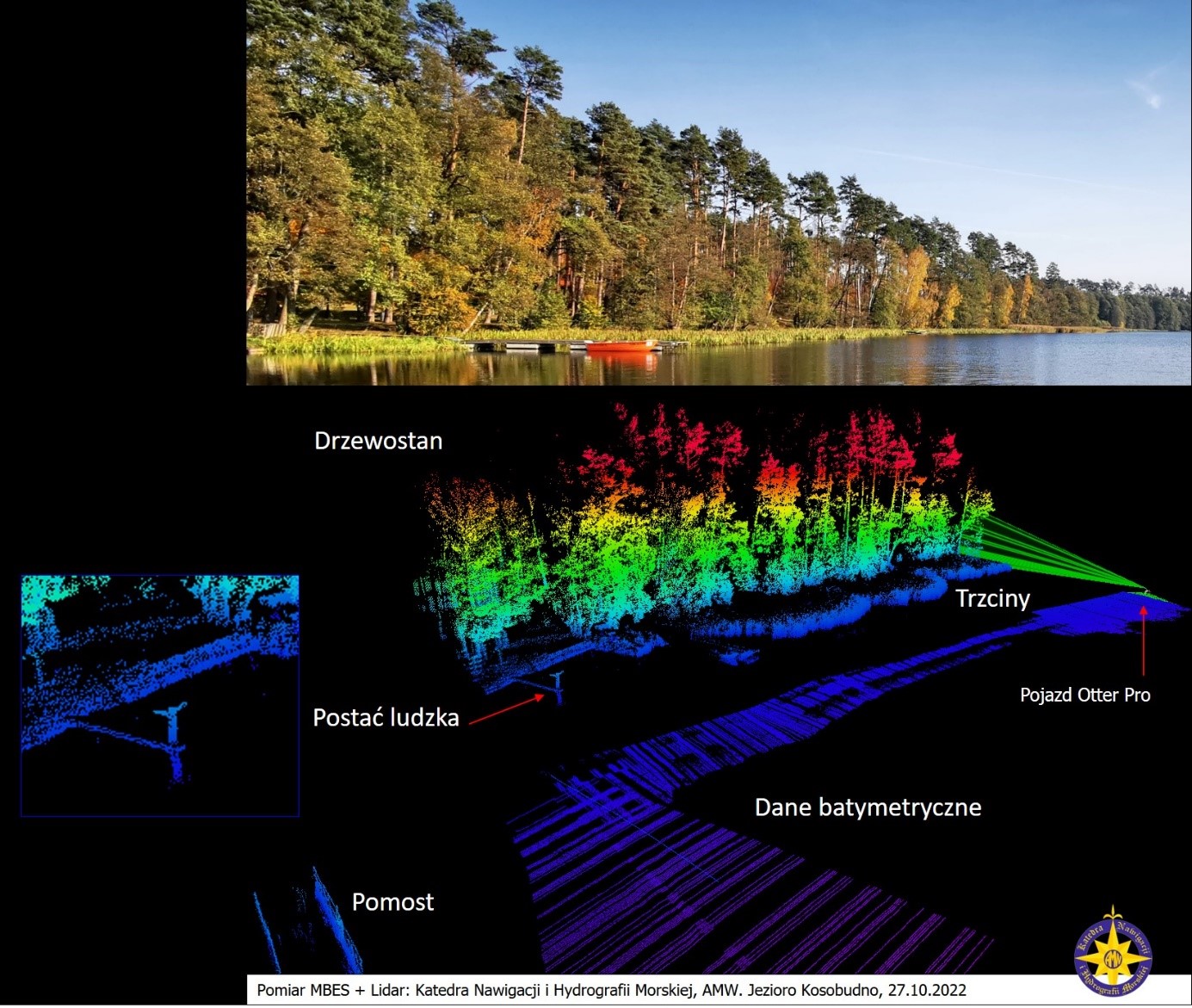
Pojazd nawodny Otter Pro wyposażony jest w skaner laserowy NORBIT iLiDAR do zbierania danych geoprzestrzennych. System rejestruje ~300 000 punktów pomiarowych na sekundę. Skaner łatwo się montuje a jego obsługa nie sprawia większych trudności. Lidar umożliwia stosunkowo szybkie pozyskiwania chmury punktów w czasie rzeczywistym.
Rys. 3. Lidar na wyposażeniu platformy pomiarowej
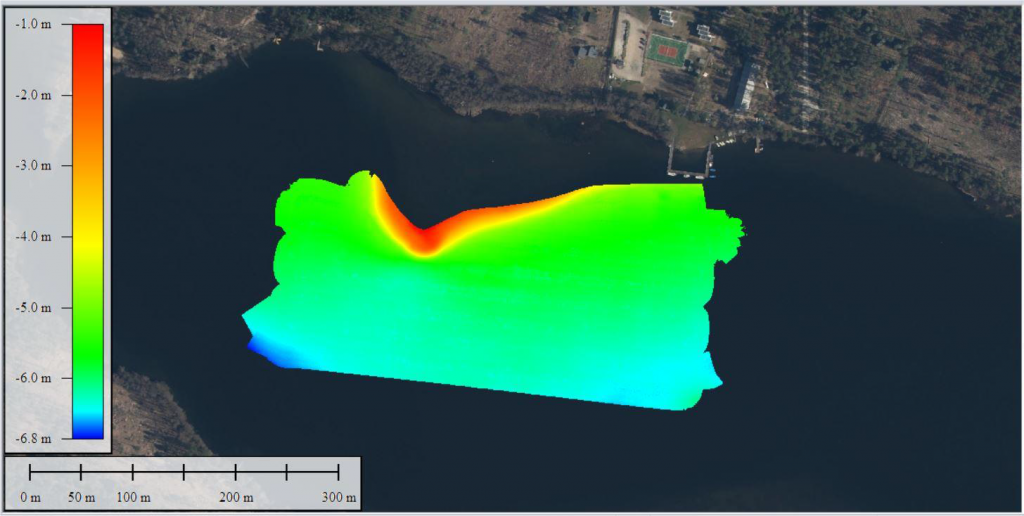
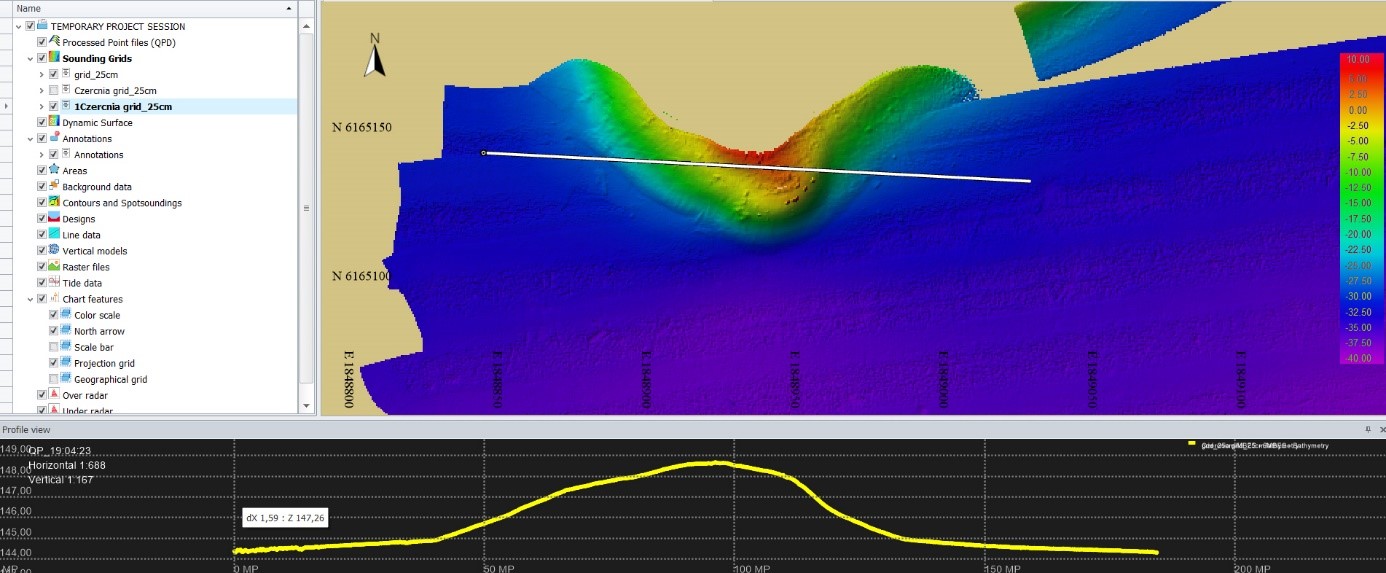
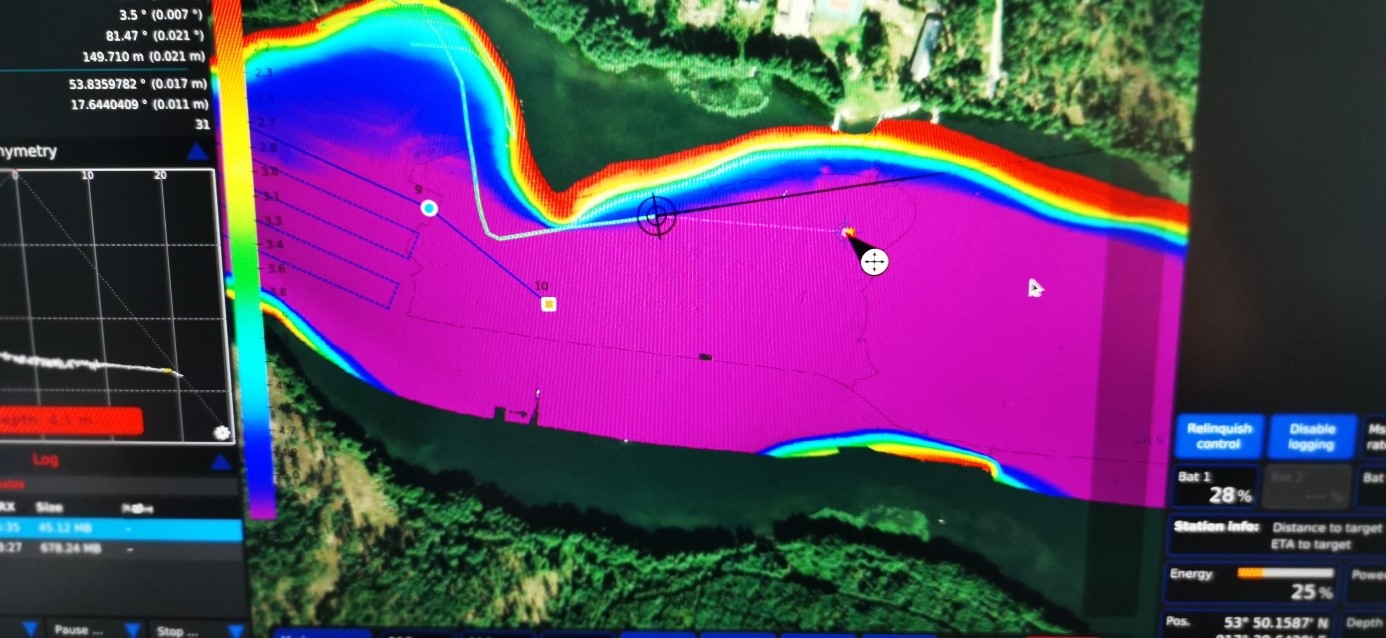
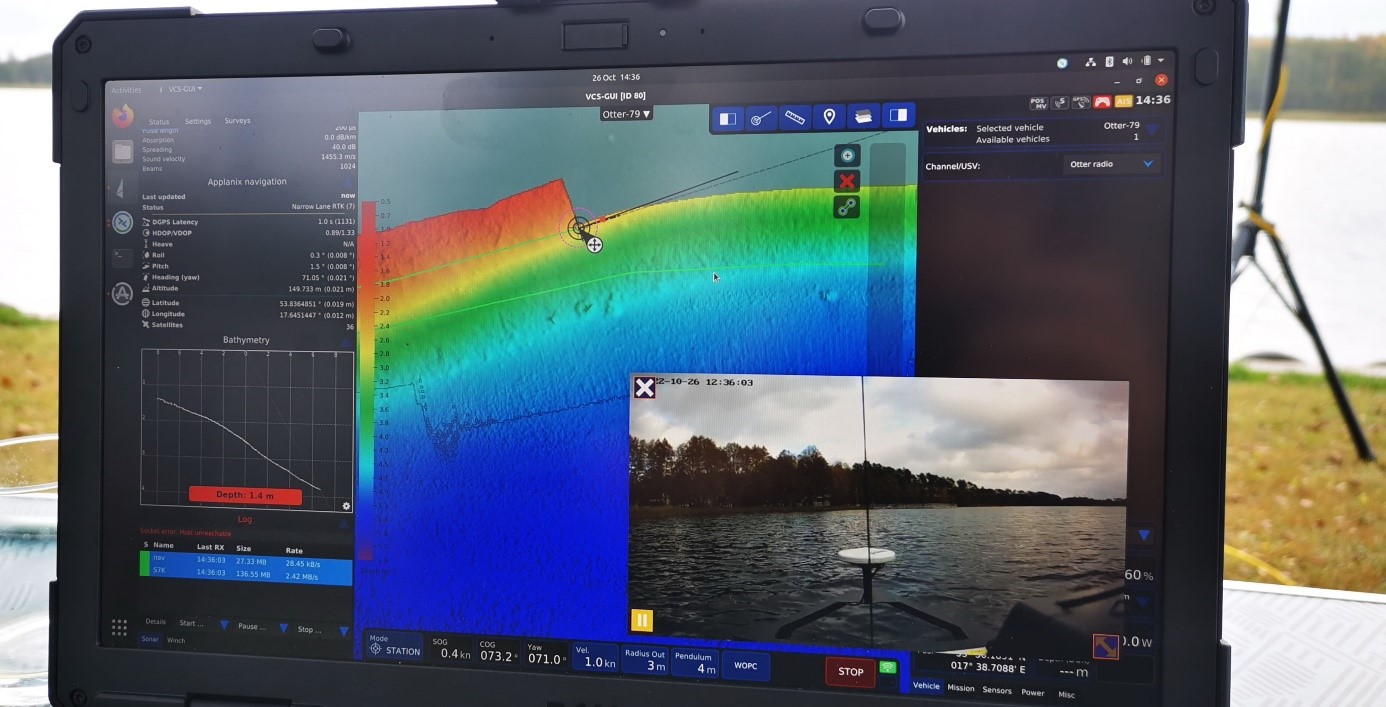
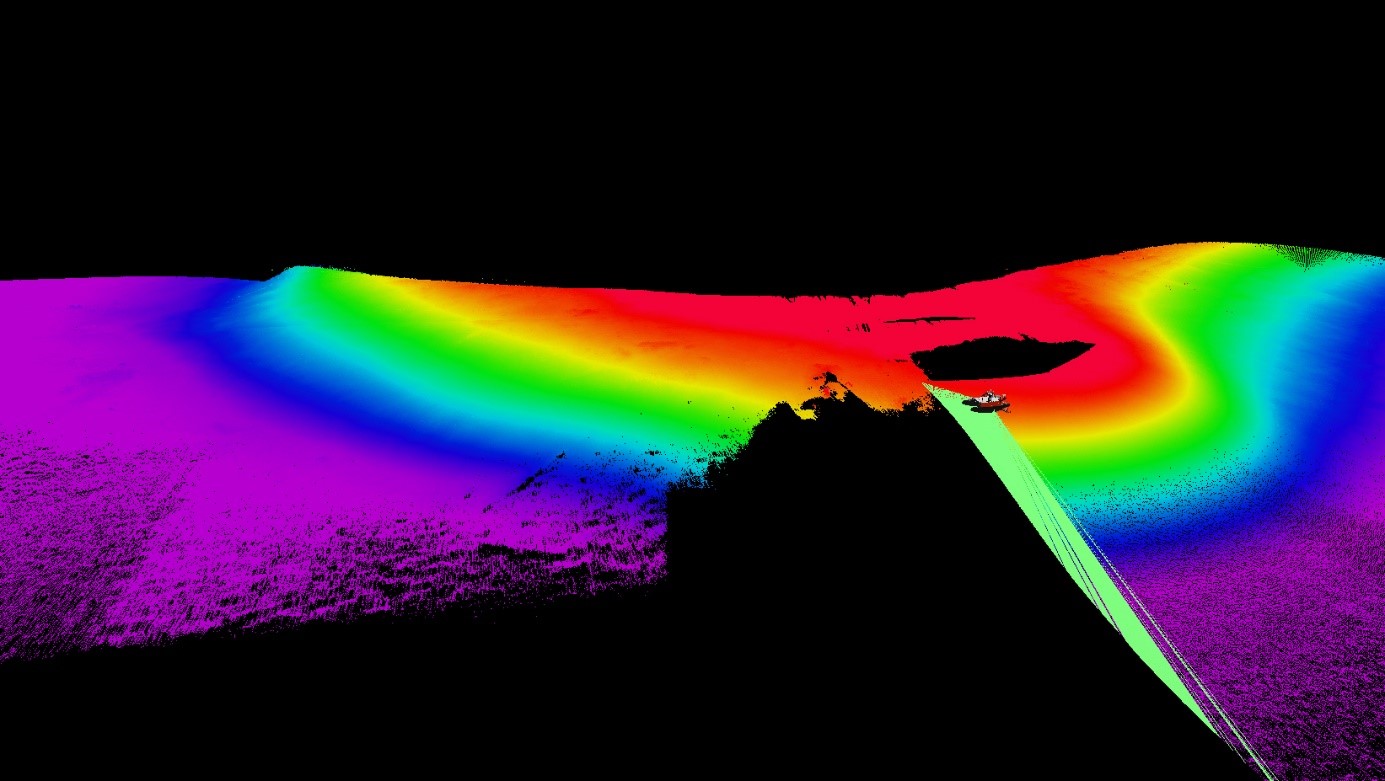
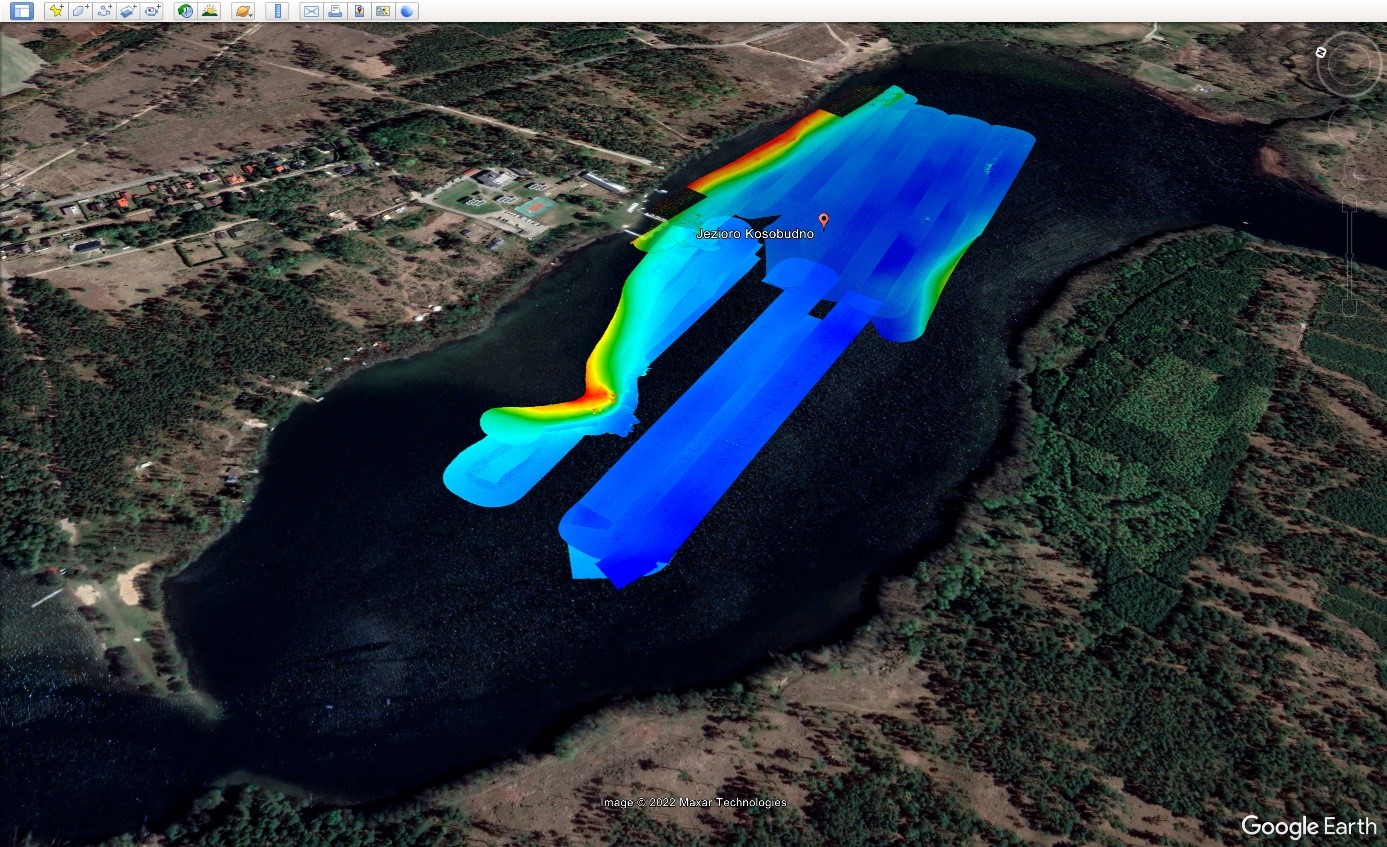
W październiku 2022 kadra KNIHM wykonała pomiary batymetryczne, lidarowe i hydrologiczne na Jeziorze Kosobudno. Pomiary batymetryczne wykonano z rozdzielczością 25cm z użyciem 140° sektora kątowego echosondy wielowiązkowej. Przed rozpoczęciem pomiarów przeprowadzono kalibrację echosondy wielowiązkowej „patch test” uzyskując wartości: roll (+Port Up) = 0.08°, pitch (+Bow Up) = 0.75°, Yaw (+Clockwise) = 0.10°.
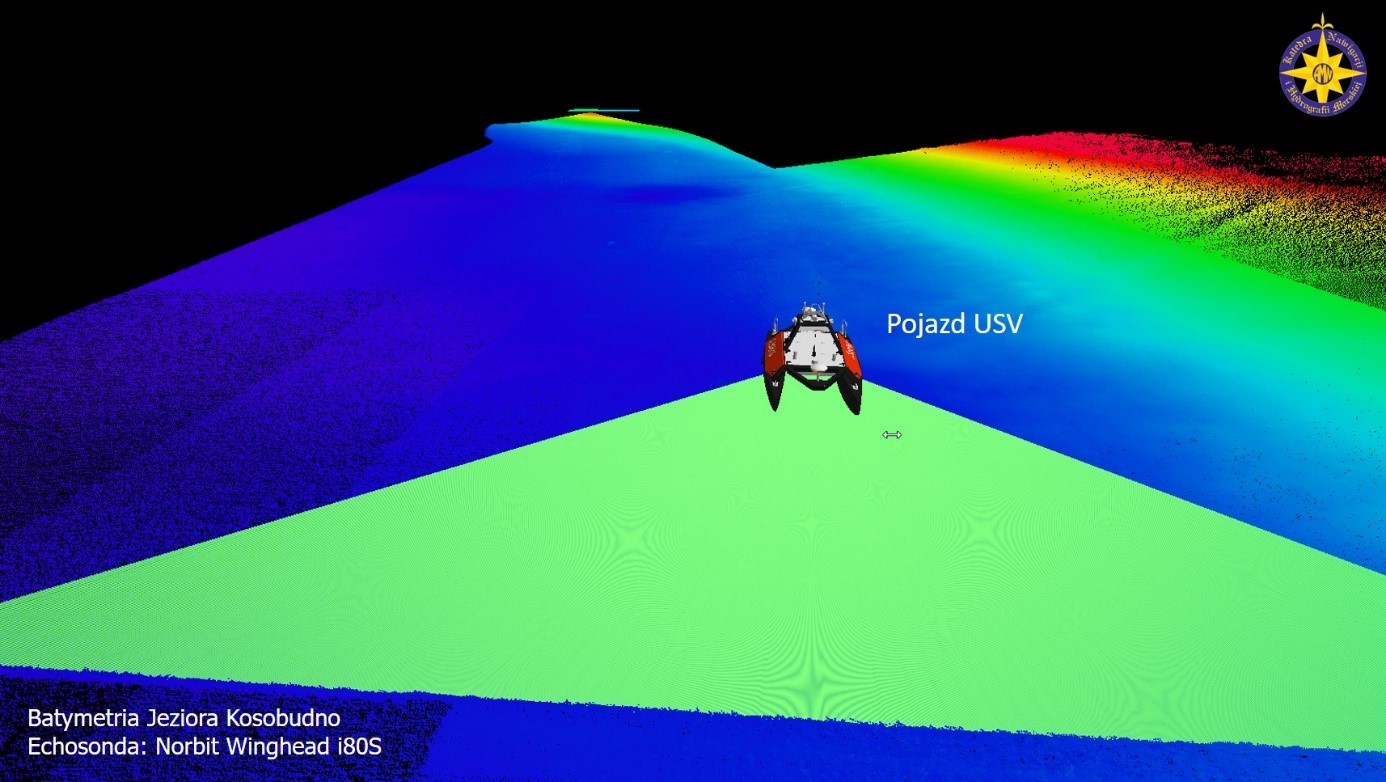
Rys. 4. Model powierzchnia dna o rozdzielczości 0.25m. Jezioro Kosobudno, 2022.
Bezzałogowy pojazd nawodny Otter Pro to mobilny system do mapowania dna morskiego, jezior, rzek, kanałów portowych, stawów i innych akwenów osłoniętych. Stacja sterowania pojazdem VCS firmy Maritime Robotics pozwala hydrografowi planować misje w oparciu o graficzny interfejs użytkownika (GUI) oparty na mapach morskich, a także monitorować misję i jakość pozyskiwania danych. Otter jest wyposażony w elektryczne silniki strumieniowe, które są zasilane nawet czterema mocnymi i wymiennymi zestawami akumulatorów. Daje to Otterowi najlepszy w swojej klasie czas operowania na wodzie. Przy prędkości 2 węzłów i zasileniu z 4 baterii czas operowania pojazdu na wodzie wynosi 20 h. Szerokopasmowa komunikacja zapewnia łączność z pojazdem w promieniu 2km. Otter Pro jest wyposażony w maszt Targa z punktem podnoszenia, światłami nawigacyjnymi, kamerą skierowaną w kierunku „do przodu” i szerokopasmowym radiem komunikacyjnym. Światła i elektronika są sterowane programowo z VCS. Otter Pro posiada gniazdo karty SIM dla sieci WAN. Może być używany do odbierania poprawek RTK podczas pracy lub używany do sterowania pojazdem przez sieć komórkową. Ciekawostką jest również fakt, że na wyposażeniu pojazdu znajduje się winda w czujnikiem SVP, która umożliwia opuszczanie sondy do dna z jednoczesnym pomiarem rozkładu prędkości dźwięku w kolumnie wody.
Opracowanie: Artur Grządziel, hydrograf morski kat. A